새로운 기술이 촉각을 부여함에 따라 로봇은 곧 사람들이 세탁 및 기타 가사 일을 하도록 도울 수 있을 것이다.
ReSkin이라는 시스템을 통해 로봇은 인간에게 제2의 천성인 촉각만을 사용하여 얇은 천과 같은 물체를 구별할 수 있다. 그러나 Carnegie Mellon University의 팀에 따르면 로봇의 경우 유리를 잡거나 수건을 접는 것과 같은 작업은 지금까지 "극도로 어려운" 작업이다.
터치를 통해 수집된 데이터의 양은 정량화하기 어렵고 감각은 최근까지 로봇 공학에서 시뮬레이션하기 어려웠다.
"인간은 무언가를 보고, 손을 뻗은 다음, 그것을 잡을 올바른 위치에 있는지 확인하기 위해 터치를 사용한다."라고 컴퓨터 과학 학교의 조교수이자 로봇 인식 부서의 책임자인 David Held는 말한다.
Doing (R-Pad) Lab, 대학 릴리스 . “인간이 하는 많은 촉각 감각은 우리에게 자연스러운 일이다. 우리는 그것에 대해 그렇게 많이 생각하지 않기 때문에 그것이 얼마나 소중한지 깨닫지 못한다.”
세탁물을 접기 위해 로봇은 인간의 손가락이 수건이나 셔츠의 맨 위 층을 느끼고 그 아래 층을 잡을 수 있는 방식을 모방하는 센서가 필요하다. 연구원들은 로봇에게 천의 맨 위 겹을 느끼고 움켜잡도록 가르칠 수 있지만, 로봇이 다른 겹을 감지하지 않으면 천을 잡거나 접을 수 없을 것이다.
"이 문제를 어떻게 고칠까?" "글쎄, 아마도 우리에게 필요한 것은 촉각 감지이다."
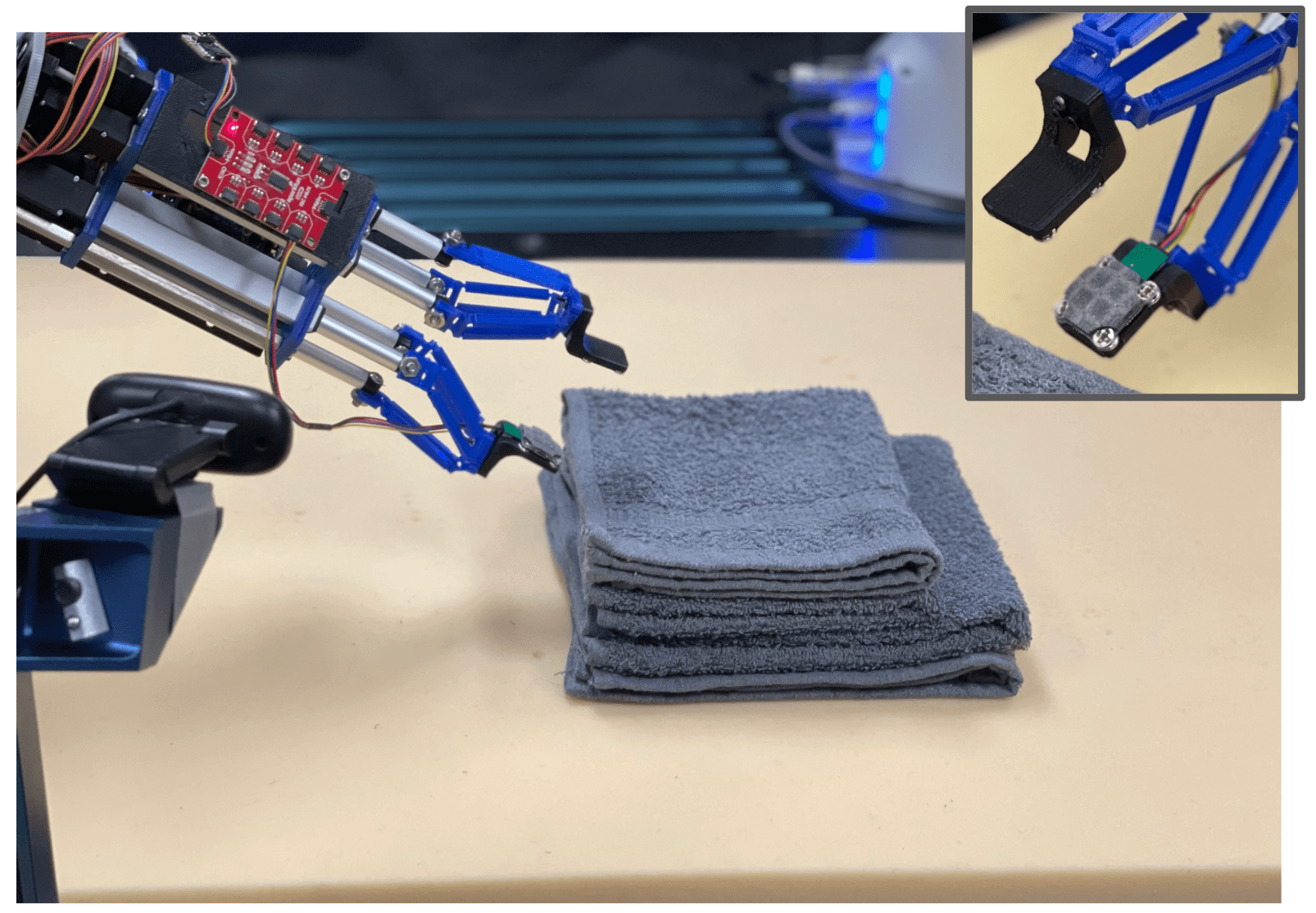 Robotics Institute의 새로운 연구는 로봇이 천 겹을 느낄 수 있도록 하여 언젠가 로봇이 세탁물 접기와 같은 가사 일을 하는 사람들을 도울 수 있게 할 수 있다. (제공: Carnegie Mellon University)
Robotics Institute의 새로운 연구는 로봇이 천 겹을 느낄 수 있도록 하여 언젠가 로봇이 세탁물 접기와 같은 가사 일을 하는 사람들을 도울 수 있게 할 수 있다. (제공: Carnegie Mellon University)
팀 은 3축 터치 감각을 제공하는 자성 입자가 내장된 얇고 탄력 있는 폴리머로 만든 오픈 소스 터치 감지 피부를 개발했다 . ReSkin은 로봇이 시각적으로만 인식하는 것이 아니라 천 겹을 느낄 수 있도록 도와준다.
"움직임이나 피부의 움직임으로 인한 자기장의 변화를 읽음으로써 촉각 감지를 달성할 수 있다."라고 Ph.D.인 Thomas Weng이 설명합니다. RI 박사후 연구원인 Daniel Seita와 대학원생인 Sashank Tirumala와 함께 프로젝트에 참여한 R-Pad Lab의 학생이다. "우리는 이 촉각 감지를 사용하여 센서로 집은 천 겹의 수를 결정할 수 있다."
다른 연구에서는 단단한 물체를 잡기 위해 촉각 감지를 사용했지만 천은 변형 가능하다. 즉, 만지면 변하기 때문에 조작하기가 더 어렵다. 천에 대한 로봇의 그립을 조정하면 포즈와 센서 판독값이 모두 변경된다.
연구원들은 로봇에게 직물을 잡는 방법이나 위치를 가르치지 않았다고 말한다. 대신 그들은 먼저 ReSkin 센서를 사용하여 얼마나 많은 천을 잡고 있는지 추정하고 그립을 조정하여 다시 시도함으로써 몇 겹의 천을 잡고 있는지 가르쳤다. 그런 다음 그들은 로봇이 서로 다른 질감과 색상을 사용하여 한 겹과 두 겹의 천을 집는 것을 보았다.
"이 센서의 프로필이 너무 작아서 천 층 사이에 센서를 삽입하는 매우 정밀한 작업을 수행할 수 있었다. 다른 센서, 특히 광학기반센서로는 할 수 없는 작업이다."라고 Weng은 말한다. "이전에는 달성할 수 없었던 작업을 수행하는 데 사용할 수 있었다."
로봇의 향상된 민첩성은 ReSkin의 얇음과 유연성에 달려 있다고 연구원들은 설명한다. 그들은 로봇이 실제 세탁바구니를 다룰 준비가 되기 전에 더 많은 연구가 필요하다고 강조한다 .
"이 새로운 센서로 무엇을 할 수 있는지에 대한 탐구입니다."라고 Weng은 결론지었다. "우리는 로봇이 부드러운 물건에 대해 이 자기 피부 로 느낄 수 있게 하는 방법을 탐구 하고 있으며 로봇이 궁극적으로 세탁을 할 수 있도록 하는 데 필요한 천을 조작하는 간단한 전략을 탐구하고 있다."
이 팀은 2022년 지능형 로봇 및 시스템에 관한 국제회의에서 연구결과를 발표했다.
South West News Service의 작가 Danny Halpin이 이 보고서에 기고했다.